Содержание
- Краткое описание
- Особенности
- Основные отличия чипов A3977 и A3979
- Функциональная схема драйвера
- Описание выводов
- Параметры микросхем
- Теория: микрошаговый режим работы ЩД
- Детальное описание микросхем
- Информация по применению
- Графики работы в разных режимах микрошага
- На главную
Максимально допустимые значения параметров
Временны́е требования к управляющим сигналам
Таблица установки режима микрошага
Таблица значений тока в обмотках
Преимущества и недостатки режима
Вход тактовых импульсов («STEP»)
Вход выбора направления вращения («DIR»)
Входы выбора режима микрошага («MS1» и «MS2»)
Выход контроля исходного состояния («HOME»)
Вход активизации режима сна («nSLEEP»)
Вход разрешения работы («nENABLE»)
Схема стабилизации тока в обмотках ШД
Игнорирование сигнала от токовых компараторов
Принцип синхронного выпрямления
Понижающий стабилизатор напряжения
Аварийное отключение силовой части (Shutdown)
A3977 и A3979: драйверы биполярного шагового двигателя на полевых транзисторах со встроенным транслятором и режимом микрошага
11.06.21
Предлагаемая вашему вниманию заметка является вольным пересказом на русский язык оригинальной документации на чипы A3977 и A3979, дополненным теорией работы шагового двигателя (ШД) в режиме микрошага. Данные дополнения сделаны для того, чтобы помочь разработчику более полно разобраться с нюансами работы рассматриваемых микросхем. На мой взгляд, даташыты производителя на чипы A3977 и A3979 страдают излишней лаконичностью, и даже расширенные аппноты (тыц, тыц) отвечают далеко не на все вопросы, которые могут возникнуть у проектировщика драйвера ШД (особенно у новичка в данной области). Поэтому в предлагаемой заметке было решено не только описать работу конкретных микросхем, но и осветить соответствующие общие теоретические моменты.
ВАЖНОЕ ПРИМЕЧАНИЕ: Здесь и далее под транслятором понимается схема преобразования «простейших» сигналов управления типа STEP, DIR и т.д. в сигналы управления ЦАП'ами драйвера.
Краткое описание
Микросхемы A3977 и A3979 являются логически завершенными драйверами для биполярных (т.н. двухфазных) ШД, поддерживающими работу в полношаговом и микрошаговом режимах (A3977 обеспечивает деление шага на 2, 4 и 8, A3979 – на 2, 4 и 16). Выходные мостовые каскады микросхем позволяют управлять обмотками двигателя при токе до 2,5А и напряжении питания до +35,0В. Чипы имеют встроенную схему импульсной стабилизации тока обмоток с фиксированным временем отключения мостов, которая может обеспечивать режимы медленного (slow-decay), быстрого (fast-decay), и смешанного (mixed-decay) спада тока в обмотках. Использование данной схемы позволяет уменьшить слышимый шум двигателя (гул), увеличить точность шага и уменьшить тепловую мощность, выделяемую микросхемой.
Благодаря наличию транслятора, микросхемы A3977 и A3979 весьма просты в использовании. Фактически основное управление двигателем осуществляется всего по четырем линиям: STEP (частота вращения), DIR (направление вращения) и MS2:MS1 (режим вращения: полношаговый, деление на 2, деление на 4 либо деление на 8 или 16). Таблицы очередности переключения фаз ШД, токовые таблицы для режимов микрошага и т.д. уже́ заложены в рассматриваемые микросхемы. Поэтому данный 4-х битный интерфейс идеально подходит для приложений, в которых использование микроконтроллера невозможно (либо в которых микроконтроллер сильно загружен другими задачами).
Принцип синхронного выпрямления, используемый в чипах A3977 и A3979, позволяет снизить мощность, выделяемую микросхемой при работе импульсной схемы стабилизации тока в обмотках. Встроенная схема защиты обеспечивает выключение чипа при перегреве кристалла и предотвращает протекание сквозных токов через ключи выходных мостов. Также A3977 и A3979 имеют встроенную схему блокировки при пониженном напряжении питания (Under Voltage LockOut или UVLO) со стороны «логической» части.
Микросхемы A3977 и A3979 являются повыводно совместимыми.
Микросхемы A3977 и A3979 выпускаются в корпусах TSSOP-28 с теплоотводящим контактом снизу корпуса (индекс «LP» в наименовании). В таком корпусе чипы могут работать только в диапазоне температур -20°C…+85°C.
Микросхема A3977 доступна также в корпусе PLCC-44 (индекс «ED» в наименовании). В этом корпусе доступно уже два температурных диапазона работы: -40°C…+125°C (индекс «К» в наименовании) или -20°C…+85°C (индекс «S» в наименовании). Сравнительная таблица со всеми возможными моделями чипов A3977 и A3979 представлена ниже:

Обратите внимание на то, что в самом последнем даташыте на A3977 упоминается только корпус TSSOP-28, однако, китайцы про это не в курсе: на алиэкспрессе до сих пор навалом предложений чипов в корпусе PLCC-44.
Особенности микросхем A3977 и A3979
• мощный выходной каскад: +35,0В / ±2,5А;
• низкое сопротивление открытого канала выходных ключей:
0,45 Ом / 0,36 Ом (A3977);
0,28 Ом / 0,22 Ом (A3979);
• диапазон питания «логической» части чипа: +3,0В…+5,5В;
• возможность работы в режиме микрошага:
1/2 1/4 1/8 (A3977);
1/2 1/4 1/16 (A3979);
• наличие выхода исходного состояния «Home»;
• возможность синхронного выпрямления, снижающего выделяемую чипом мощность;
• схема блокировки работы при пониженном напряжении питания (UVLO);
• схема тепловой защиты кристалла;
• схема защиты выходного каскада от сквозных токов;
• три доступных режима спада тока в обмотках;
• автоматическое включение наиболее подходящего режима спада тока в обмотках.
Основные отличия чипов A3977 и A3979
Микросхемы A3977 и A3979 крайне схожи между собой. По сути A3979 – это улучшенный и более дорогой вариант A3977. Отличия между данными чипами заключаются лишь в разном сопротивлении выходных ключей и в том, на сколько частей микросхема может дробить один шаг двигателя. Данные отличия подробно описаны чуть выше (см. пункт «Особенности микросхем A3977 и A3979»).
Функциональная схема драйвера
Оба рассматриваемых чипа построены по одной функциональной схеме (жирными линиями здесь показаны силовые цепи, по которым может течь большой ток):
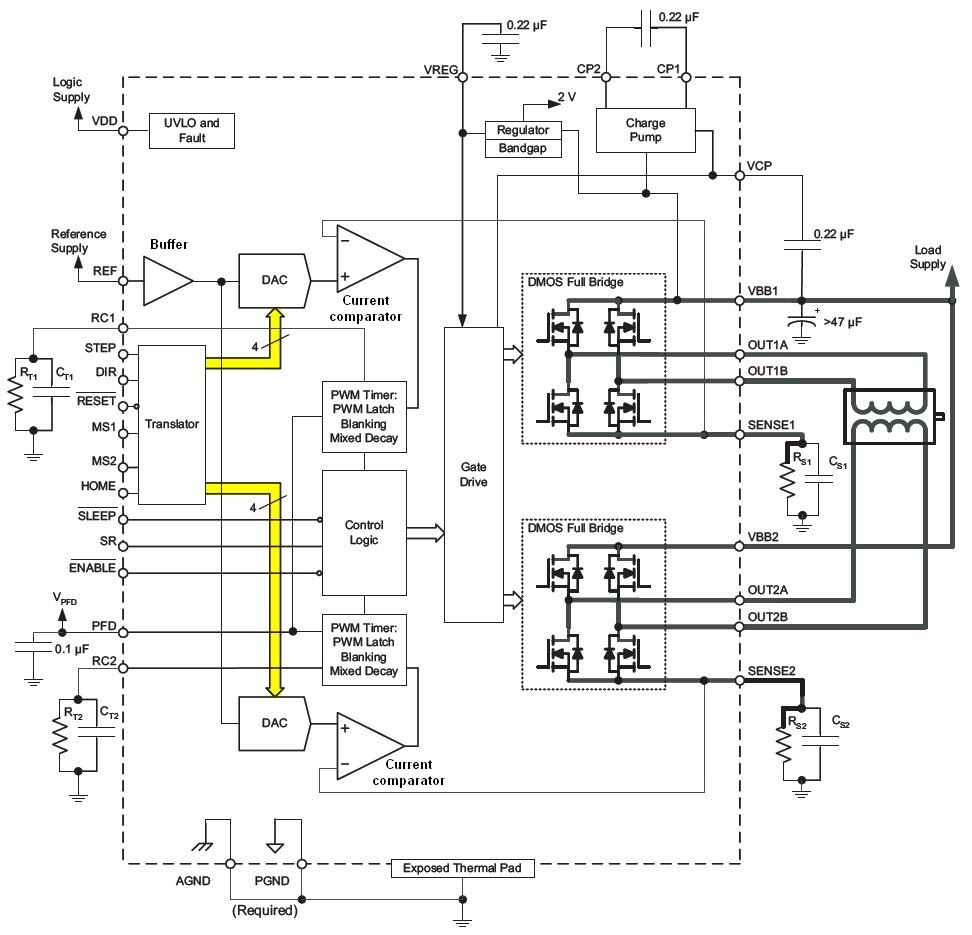
Видим, что выходная часть данных микросхем реализована традиционным способом: для каждой обмотки двигателя выделен свой H-мост (DMOS Full Bridge), питающийся от отдельного источника напряжения и имеющий датчик тока RS на нижней стороне. Транзисторы обоих мостов управляются при помощи драйвера затворов (Gate Drive), питающегося от встроенного понижающего преобразователя напряжения (Regulator). Обратите внимание на то, что для управления ключами в верхних плечах мостов к драйверу поводится отдельная линия питания, формируемого повышающим преобразователем с накачкой заряда (Charge Pump).
Схема импульсной стабилизации тока для каждой обмотки включает в себя токовый компаратор (Current comparator), 4-х разрядный ЦАП (DAC) и блок «PWM Timer». Компаратор отключает соответствующую обмотку двигателя после того, как ток в ней превысит установленное значение, формируемое ЦАПом (отметим, что при работе в микрошаговом режиме ЦАП формирует последовательность значений тока, близкую к синусоидальной). Опорное напряжение для ЦАПов берется со входа микросхемы «REF» через буфер (Buffer), снижающий ток потребления по данному входу и делящий подаваемое напряжение на 8. Блок «PWM Timer» формирует фиксированное время, в течение которого соответствующий мост будет заведомо выключен, а также способ спада тока в обмотке (в зависимости от того, на какой части синусоиды в данный момент находится двигатель). После этого напряжения с обоих блоков «PWM Timer» проходят через узел дополнительной логики (Control Logic), выдающий необходимый сигнал для управления ключами мостов с учетом состояния входов «nSLEEP», «nSR» и «nENABLE».
Транслятор (Translator) формирует коды для обоих ЦАПов в соответствии с сигналами «STEP», «DIR» и «MS1:MS2» (задают коэффициент деления шага). Также транслятор формирует сигнал прохождения ротором исходного состояния («HOME») и при необходимости корректно сбрасывает устройство (см. вход «nRESET»). Для устранения сбоев, обусловленных недостаточным напряжением питания «логической» части микросхемы, в состав чипов введен блок «UVLO and Fault», блокирующий работу при пониженном питании VDD.
Описание выводов
Ниже приведено описание выводов микросхем в корпусе TSSOP-28, как наиболее распространенных:
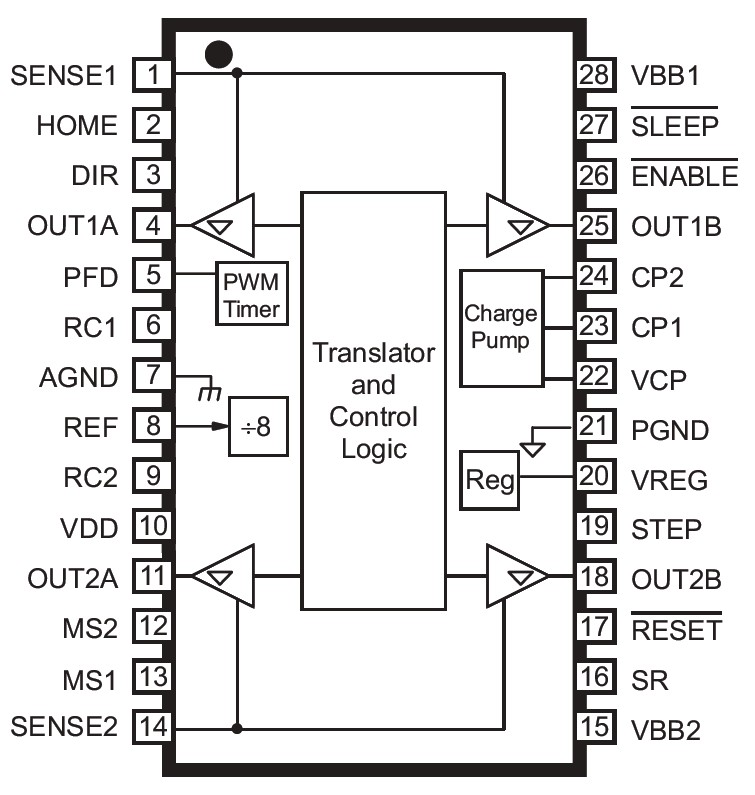
ВНИМАНИЕ!!! Выводы «AGND» и «PGND» должны принудительно соединяться на печатной плате!
| № выв. | Имя вывода | Краткое описание вывода | Подроб-нее |
| 1 | SENSE1 | Датчик тока H-моста №1 (RS1, вход) | Просмотр |
| 2 | HOME | Контроль исходного состояния транслятора (выход) | Просмотр |
| 3 | DIR | Выбор направления вращения ротора двигателя (вход) | Просмотр |
| 4 | OUT1A | Выход «А» Н-моста №1 (выход) | Просмотр |
| 5 | PFD | Установка режима спада тока в обмотках (вход) | Просмотр |
| 6 | RC1 | Установка фикс. времени отключения для Н-моста №1 (вход) | Просмотр |
| 7 | AGND | Земля «логической» части | |
| 8 | REF | Опорное напряжение для ЦАП'ов драйвера (вход) | Просмотр |
| 9 | RC2 | Установка фикс. времени отключения для Н-моста №2 (вход) | Просмотр |
| 10 | VDD | Питание «логической» части | |
| 11 | OUT2A | Выход «А» Н-моста №2 (выход) | Просмотр |
| 12 | MS2 | Установка режима микрошага (вход) | Просмотр |
| 13 | MS1 | Установка режима микрошага (вход) | Просмотр |
| 14 | SENSE2 | Датчик тока H-моста №2 (RS2, вход) | Просмотр |
| 15 | VBB2 | Питание Н-моста №2 | |
| 16 | nSR | Управление режимом синхронного выпрямления (вход) | Просмотр |
| 17 | nRESET | Вход сброса транслятора (вход) | Просмотр |
| 18 | OUT2B | Выход «B» Н-моста №2 (выход) | Просмотр |
| 19 | STEP | Тактовые импульсы (сигнал «ШАГ», вход) | Просмотр |
| 20 | VREG | Выход понижающего преобразователя (выход) | Просмотр |
| 21 | PGND | Земля силовой части | |
| 22 | VCP | Конденсатор повышающего преобразователя | Просмотр |
| 23 | CP1 | Конденсатор повышающего преобразователя | Просмотр |
| 24 | CP2 | Конденсатор повышающего преобразователя | Просмотр |
| 25 | OUT1B | Выход «B» Н-моста №1 (выход) | Просмотр |
| 26 | nENABLE | Разрешение работы Н-мостов (вход) | Просмотр |
| 27 | nSLEEP | Активизация режима сна (вход) | Просмотр |
| 28 | VBB1 | Питание Н-моста №1 |
Параметры микросхем
Ниже перечислены основные характеристики рассматриваемых драйверов ШД.
▪ Максимально допустимые значения параметров

1 – номинальный выходной ток может быть ограничен коэффициентом заполнения, температурой окружающей среды и площадью используемого радиатора. Ни при каких условиях не превышайте указанный номинальный ток или температуру перехода +150°C!
2 – у микросхем с индексом «К» минимальная рабочая температура составляет -40°С
3 – у микросхем с индексом «К» минимальная рабочая температура составляет +105°С
▪ Тепловые характеристики
В таблице ниже представлены тепловые характеристики микросхем в корпусе TSSOP-28, как наиболее распространенных. Характеристики чипов в корпусе PLCC-44 можно найти в оригинальной документации.

График зависимости максимальной мощности рассеяния от температуры окружающей среды для корпуса TSSOP-28 показан ниже:
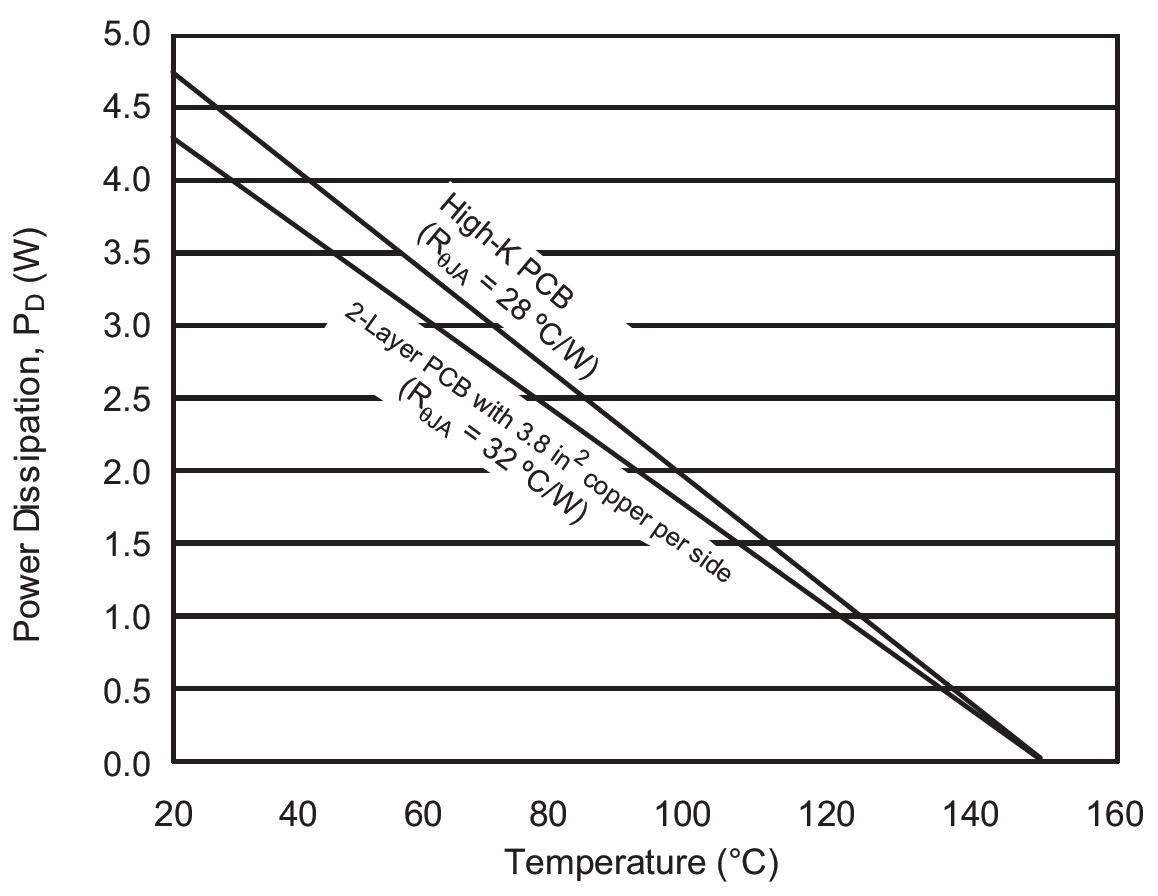
Дополнительная информация по тепловым характеристикам доступна на сайте фирмы «Allegro».
▪ Электрические характеристики
Электрические прараметры у чипов A3977 и A3979 по большей части совпадают. Отличие наблюдается только в сопротивлении открытого канала выходных ключей (выделено разным цветом). Наименования параметров переводить не стал - вроде, там и так всё понятно.
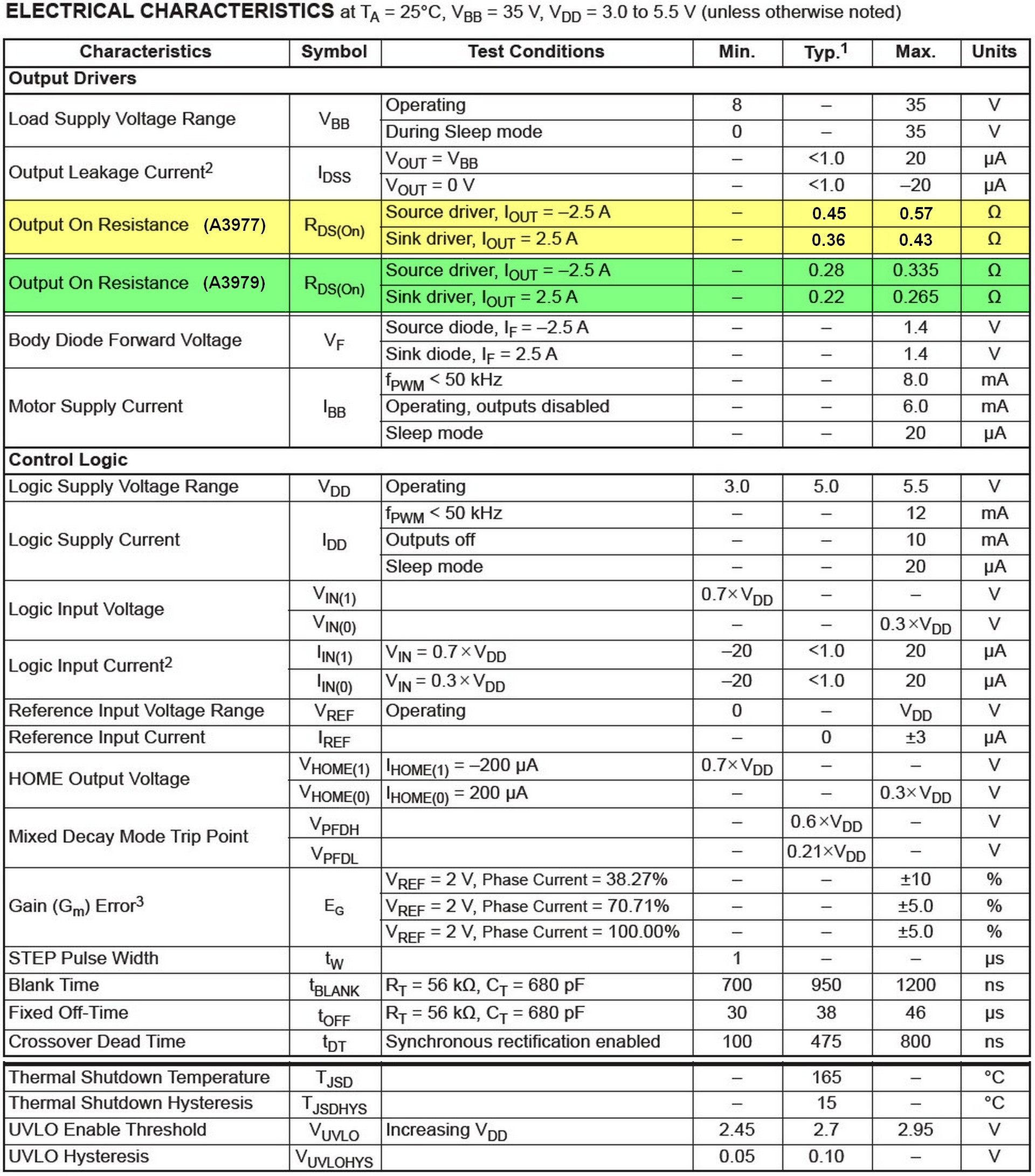
1 – типовые значения приведены только для первоначальных проектных оценок и предполагают, что микросхемы применяются в оптимальных условиях. Данные значения могут отличаться для отдельных устройств в указанных пределах (см. «Max» и «Min»)
2 – отрицательный ток – это ток, вытекающий из вывода микросхемы
3 – ошибка может быть вычислена по формуле EG = ([VREF / 8] – VSENSE) / (VREF / 8).
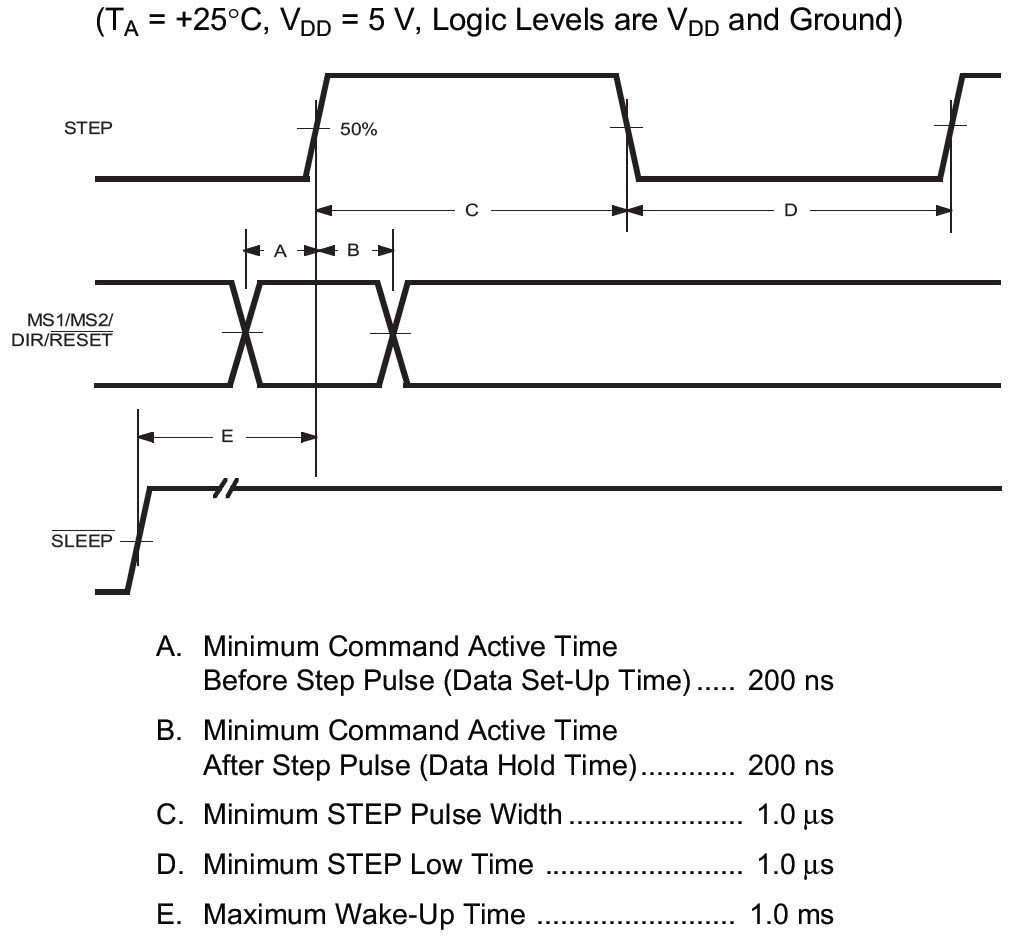
▪ Временны́е требования к управляющим сигналам
Для нормальной работы микросхем A3977 и A3979 сигнал «STEP» должен удовлетворять определенным временны́м требованиям (величи́ны «C» и «D» на рисунке ниже). Кроме того, сигналы «DIR», «MS1», «MS2» и «nRESET» должны начинаться и заканчиваться не раньше определенного времени относительно переднего фронта сигнала «STEP» (величи́ны «A» и «B»). Также обратите внимание на то, что время выхода чипа из режима спячки может составлять 1мс:
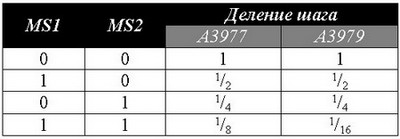
▪ Таблица установки режима микрошага
Ниже представлено соответствие сигналов «MS1» и «MS2» задаваемому ими режиму микрошага:
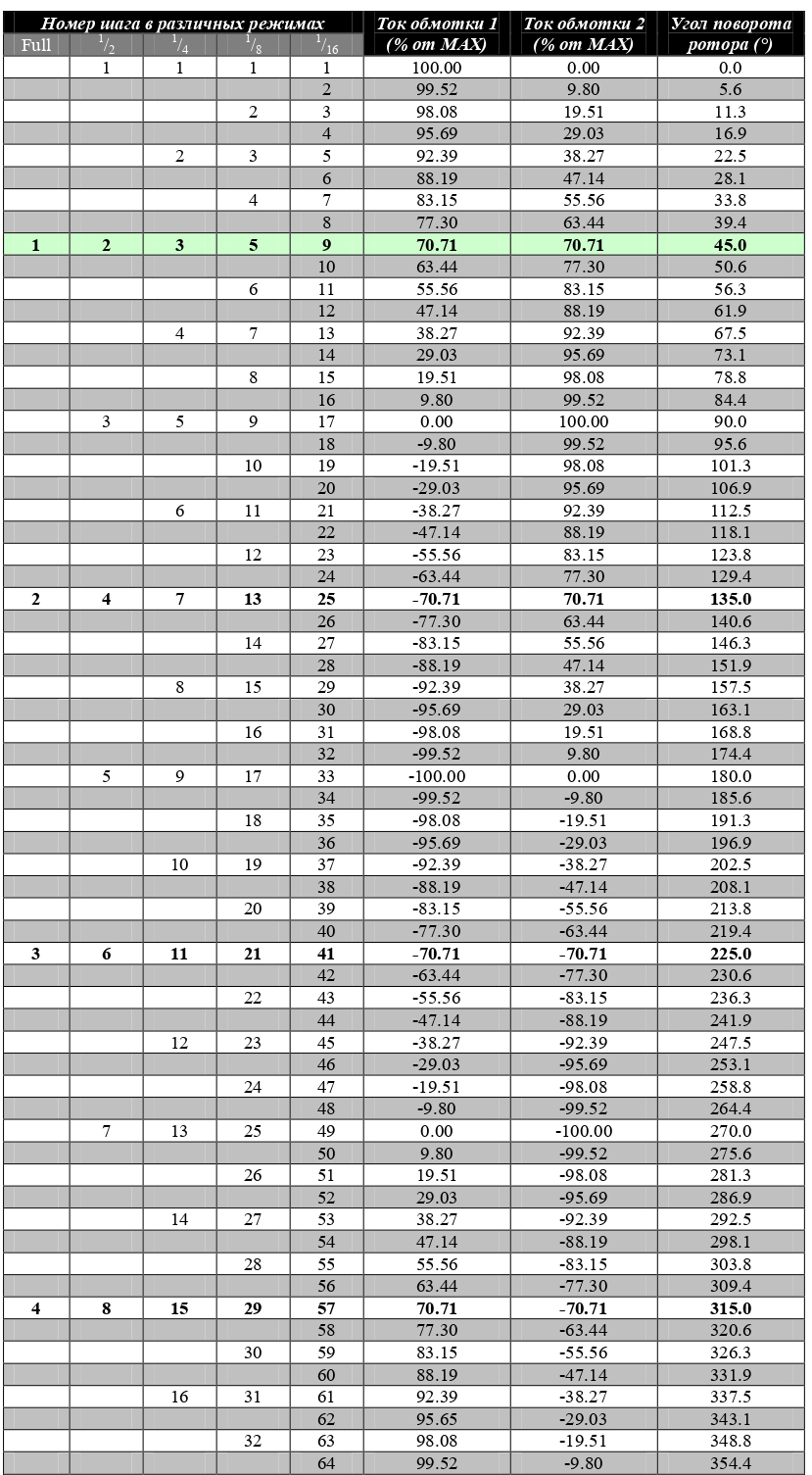
▪ Таблица значений тока в обмотках
Исходное состояние («HOME») – 45°; «DIR» = High; режим «1/8» – только для A3977; режим «1/16» – только для A3979
Теория: микрошаговый режим работы ЩД
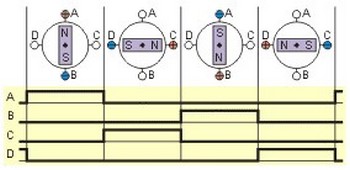
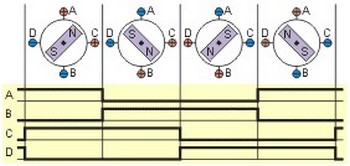
Как известно, вращение вала шагового двигателя (ШД) с постоянными магнитами (или гибридного ЩД) осуществляется за счет того, что полюсы ротора попеременно притягиваются к обмоткам статора. Поэтому существует несколько способов управления фазами шагового двигателя. В первом (самом простом) способе вращение обеспечивается попеременной коммутацией обмоток двигателя, при этом в один момент времени включена только одна фаза:
В данном случае точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя, поэтому такой способ управления называют полношаговым («One-Phase-On» Full-step). Очевидно, что в полношаговом режиме количество шагов на один оборот двигателя будет совпадать с его «паспортным» значением (например, у 1,8°-го ШД это значение будет равно 360°/1,8°=200 шагов/об). При этом есть еще один способ реализации полношагового режима – включать одновременно обе обмотки двигателя:
Такой способ называется «Two-Phase-On» Full-step (или просто Full-step) и он позволяет получить от двигателя примерно на 40% больший момент, чем в первом случае, за счет использования сразу двух обмоток.
Если скомбинировать два вышеуказанных способа, то мы получим полушаговый режим работы ШД:
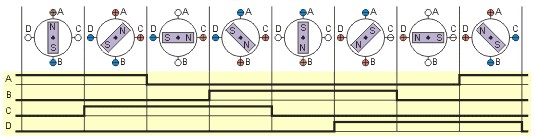
Здесь на первом шаге ротор притягивается к одной из обмоток статора, затем занимает промежуточное положение, затем притягивается к следующей обмотке, затем снова встает в промежуток и т.д. Таким образом, при каждом новом переключении обмоток ротор делает всего половину от основного («паспортного») шага. Поэтому очевидно, что в полушаговом режиме работы двигатель сделает ровно в два раза больше шагов на оборот, чем это указано в его паспорте. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом сто́ит дороже и очень заманчиво получить от, например, 100-шагового двигателя 200 шагов на оборот.
Микрошаговый режим является развитием полушагового. Дело в том, что ранее мы предполагали протекание в каждой из обмоток одинакового тока. Именно из-за этого в «промежуточных» состояниях ротор поворачивался ровно на 45°, 315°, 225° и 135°. Если же токи в обмотках не равны, то ротор окажется не точно посередине между ними, а сместится ближе к той обмотке, в которой протекает больший ток. Именно на этом и основан микрошаговый режим управления – здесь ток в фазах изменяется небольшими порциями, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Иными словами, когда включены две фазы одновременно, но их токи не равны, положение равновесия ротора будет лежать не в середине шага (как в полушаговом режиме), а в другом месте, определяемом соотношением токов фаз. Поэтому, меняя это соотношение, а также выбирая правильную полярность токов, можно обеспечить некоторое количество микрошагов внутри одного шага. Рассматриваемые микросхемы позволяют дробить шаг максимум на 8 частей (A3977) и на 16 частей (A3979), соответствующая таблица распределения токов обмоток приведена в пункте «Таблица значений тока в обмотках». При этом в настоящее время существуют чипы, реализующие деление шага на 128 и даже на 256 микрошагов, однако, не следует думать, что при этом обычный двигатель будет обеспечивать такую же точность позиционирования, которую дал бы ШД с таким же «паспортным» шагом. Например, в подавляющем большинстве случаев позиционирование ротора у движка с основным шагом 7,2° в режиме деления на 4 будет хуже, чем у двигателя, имеющего реальный основной шаг 1,8°. Этому и прочим плюсам и минусам микрошагового режима посвящен следующий пункт данного документа.
▪ Преимущества и недостатки микрошагового режима
Естественно, основной плюс работы в микрошаговом режиме – увеличение разрешающей способности шагового двигателя. Во многих приложениях, где требуются малые относительные перемещения, режим микрошага способен заменить механический редуктор – даже несмотря на то, что микрошаговый драйвер намного сложнее и дороже полношагового драйвера, вся система в результате всё равно может оказаться проще и дешевле шагового двигателя с редуктором. При этом чем сильнее мы будем дробить шаг ШД, тем, казалось бы, выше должна быть разрешающая способность системы – при количестве микрошагов, стремящемся к бесконечности, идеальный шаговый двигатель вообще должен работать как синхронный движок в режиме непрерывного вращения. При этом форма токов его фаз максимально приблизится к синусу (опять же – в идеале), причем, токи в обмотках будут сдвинуты друг относительно друга на 90°. Однако, на практике оказывается, что хотя разрешающая способность ШД в микрошаговом режиме и увеличивается, точность работы привода при этом ухудшается. Иными словами, при увеличении дробления шага точность позиционирования шагового двигателя с гарантией будет становиться ниже паспортной1, поэтому бездумно увеличивать количество микрошагов на шаг не следует. Связано это с несколькими факторами, некоторые из которых относятся непосредственно к двигателю, а некоторые – к его драйверу.
1 - паспортная точность позиционирования указывается для положений равновесия ротора при двух включенных фазах, токи которых равны.
Так, большинство коммерческих двигателей не обладают прецизионной конструкцией, поэтому зависимость между моментом и углом поворота ротора у них не является в точности синусоидальной. Вследствие этого зависимость между амплитудой синусоидального тока питания и углом поворота вала становится нелинейной. В результате ротор двигателя будет точно проходить положения каждого шага и полушага, но между этими положениями будут наблюдаться довольно значительные отклонения. Для решения данной проблемы существуют двигатели, которые оптимизированы для работы в микрошаговом режиме ещё на этапе разработки – полюсы ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов. С другой стороны, следует помнить и о том, что конструкция некоторых ШД оптимизирована для наилучшей точности именно в полношаговом режиме – здесь зубцы ротора и статора спроектированы так, чтобы в режиме полного шага в положениях равновесия ротора магнитный поток сильно возрастал. Это приводит к серьезному ухудшению точности в микрошаговом режиме, поэтому такие двигатели при использовании дробления шага лучше не применять. Кроме того, любой реальный ШД имеет т.н. мертвые зоны – это зоны, в которых момент двигателя равен нулю несмотря на поворот ротора:
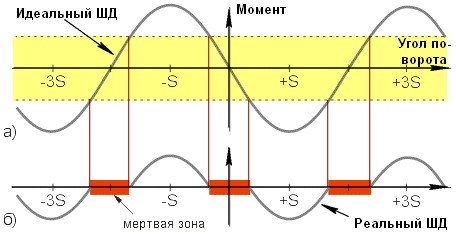
Мертвые зоны возникают из-за наличия трения покоя и динамического трения в реальных ШД. На последнем рисунке желтым цветом обозначена область момента трения, наложенная на график момента для идеального двигателя (график этот, как нетрудно догадаться, является синусоидальным). Из-за наличия этой области для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий (см. нижний график, соответствующий реальному ШД). Отсюда следует, что во-первых, трение снижает момент на валу реального двигателя, а во-вторых, оно формирует мертвые зоны вокруг каждого положения равновесия ротора. Последний фактор является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d°, то микрошаг величиной менее d° вообще не сдвинет ротор с места. Поэтому для систем с использованием дробления шага очень важно минимизировать трение покоя для максимального сужения мертвых зон.
Следует отметить, что точность позиционирования двигателя в микрошаговом режиме снижают не только факторы, относящиеся непосредственно к ШД. Драйвер тоже вносит сюда свою лепту. Одним из источников погрешности позиционирования является неточность ЦАПа, с помощью которого формируются токи фаз. Дело в том, что ток должен формироваться по синусоидальному закону, поэтому для минимизации погрешности линейный ЦАП должен иметь повышенную разрядность (ибо амплитуды токов фаз для каждого микрошага чаще всего являются «дробными»). И если разрядность ЦАПа недостаточна, то токи будут устанавливаться довольно грубо, вследствие чего их форма будет далека от синуса. Отметим, что ЦАПы, встроенные в микросхемы A3977 и A3979, являются специализированными – они изначально нелинейны и спроектированы так, что позволяют получать на выходе именно «синусоидальные» значения тока обмоток (см. пункт «Таблица значений тока в обмотках»). Кроме того, рассматриваемые драйверы имеют возможность управлять скоростью спада тока обмоток двигателя во время работы (см. ниже), что позволяет произвести «тонкую подстройку» драйвера под конкретный двигатель для получения наименьшей погрешности позиционирования.
Несмотря на вышеперечисленные недостатки, микрошаговый режим работы ШД используется всё чаще и чаще. Применение специализированных драйверов, а также тщательный выбор типа и марки двигателей зачастую позволяет спроектировать систему с высокой разрешающей способностью и требуемой точностью позиционирования привода безо всяких редукторов и прочей дорогостоящей и сложной механики. Отметим, что кроме увеличения разрешающей способности ШД микрошаговый режим имеет и другие преимущества. Например, он позволяет получить намного более плавное вращение ротора, особенно на низких частотах. Однако, на частотах в 2…3 раза выше собственной резонансной частоты ротора и нагрузки, микрошаговый режим дает незначительные преимущества по сравнению с полу- или полношаговым режимами. Более того, при очень больших скоростях вообще рекомендуется работать в обычном полношаговом режиме, так как управление гармоническим сигналом теряет преимущества. Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
Еще одно достоинство микрошагового режима состоит в том, что он способен уменьшить время установления механической системы. Дело в том, что при выполнении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг него:
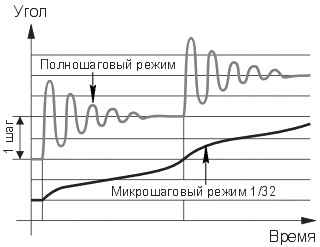
Время установления положения ротора зависит от характеристик нагрузки и от схемы драйвера. Во многих приложениях такие колебания являются нежелательными. Избавиться от этого явления можно путем использования микрошагового режима. Как видно из последнего рисунка, в полношаговом режиме наблюдаются выбросы и колебания, в то время как в режиме микрошага их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена при помощи проведения калибровки и последующей компенсации путем корректировки токов фаз (если, конечно, драйвер позволяет выполнить такую корректировку).
▪ Ток удержания ротора
Нетрудно видеть (см. выше), что в процессе вращения ротор двигателя попадает в точки своего «естественного» равновесия только в режиме полного шага без перекрытия фаз («One-Phase-On» Full-step). В полношаговом же режиме с перекрытием фаз («Two-Phase-On» Full-step) положения, в которые поворачивается ротор, смещены на полшага относительно данных точек. Очевидно, что промежуточные состояния ротор может принимать только при наличии тока в обмотках, поскольку после снятия с них питания ротор гарантированно свалится в ближайшую точку «естественного» равновесия. То же самое с 50%-й вероятностью произойдет и в режиме полушага, а уж при работе с микрошагом, когда ротор вообще практически всё время находится вне «естественных» положений, вероятность потери им текущего угла поворота близка к 100 процентам. Поэтому для того, чтобы ротор не смещался даже после остановки вращения двигателя, необходимо подавать ток в обмотки постоянно (т.н. ток удержания).
Отметим, что ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда и в остановленном состоянии двигатель должен обеспечивать полный момент, что в случае работы с шаговым двигателем вполне выполнимо. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Отметим, что в микросхемах A3977 и A3979 абсолютное значение тока в обмотках задается при помощи опорного напряжения VREF, подаваемого на вывод 8 чипа (корпус TSSOP-28), поэтому ток удержания можно регулировать при помощи изменения этого напряжения.
▪ Стабилизация тока в обмотках
Одной из задач, которую приходится решать при работе в микрошаговом режиме, является удержание тока в обмотках на требуемом уровне. Напомним, что для формирования микрошагов между данными токами должно выполняться определенное соотношение (см. пункт «Таблица значений тока в обмотках») - причем именно соотношение. Поэтому в микрошаговом режиме простейшие способы питания обмоток (L/R-питание, L/5R-питание, питание с удвоенным напряжением и т.д.) не пригодны, и на первый план здесь выходит широтно-импульсная (ключевая) стабилизация тока. Ключевой стабилизатор обеспечивает высокую скорость нарастания тока в обмотках вместе с простотой его регулирования и очень низкими потерями. Еще одним преимуществом схемы с ключевой стабилизацией тока является то, что она поддерживает момент двигателя постоянным, независимо от колебаний напряжения питания. Это позволяет использовать для запитки обмоток ШД простые и дешевые нестабилизированные источники. Для обеспечения высокой скорости нарастания тока используют напряжение источника питания, в несколько раз превышающее номинальное. Путем регулировки скважности импульсов, среднее напряжение и ток поддерживаются на номинальном для обмотки уровне. Это поддержание производится за счет действия обратной связи, сигнал для которой снимается с датчика тока.
Простейшая схема импульсного регулятора тока показана ниже:
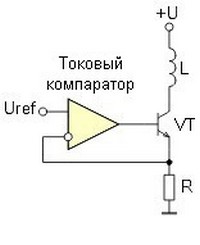
Непосредственное включение и выключение обмотки осуществляется транзистором VT (в современных драйверах здесь обычно используются полевики). Для организации контура обратной связи последовательно с обмоткой L включается датчик тока – резистор R. Падение напряжения на этом резисторе прямо пропорционально току в обмотке, поэтому после ее включения напряжение на датчике тока линейно возрастает. Когда это напряжение достигает значения Uref, срабатывает токовый компаратор, и ключ VT выключается, что приводит к отключению обмотки и спаданию тока в ней. Когда ток уменьшится до нижнего порога, определяемого гистерезисом токового компаратора, ключ VT снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным. Управляя величиной Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Можно также задавать его с помощью ЦАП в форме синусоиды, реализуя таким образом микрошаговый режим (что и сделано в микросхемах A3977 и A3979).
Следует отметить, что вышеприведенный способ управления ключевым транзистором обеспечивает постоянную величину пульсаций тока в обмотке, которая определяется гистерезисом компаратора. Однако частота переключений будет зависеть от скорости изменения тока в обмотке, в частности, от ее индуктивности и от напряжения питания. На практике эта частота нередко получается слишком высокой даже при максимально возможных пульсациях тока в обмотке, что ведет к катастрофическому увеличению динамических потерь на ключе и его последующему выгоранию за счет перегрева. Кроме того, две такие схемы, питающие разные фазы двигателя, не могут быть засинхронизированы, что может явиться причиной дополнительных помех. Избавиться от данной проблемы можно двумя путями. Первый вариант реализован в широко распространенных микросхемах-трансляторах L297. Здесь ключ управляется не напрямую токовым компаратором, а RS-триггером, для сброса которого как раз используется компаратор, а для установки – дополнительный генератор:
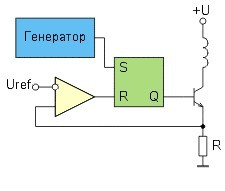
Когда триггер устанавливается, ключевой транзистор открывается, и ток фазы начинает расти. Вместе с ним растет и падение напряжения на датчике тока. Когда оно достигает опорного напряжения Uref, компаратор переключается, сбрасывая триггер. Ключевой транзистор при этом выключается, и ток фазы начинает спадать до тех пор, пока триггер не будет вновь установлен генератором. Такая схема обеспечивает постоянную частоту коммутации, однако величина пульсаций тока не будет постоянной – она определится временем спада тока в обмотке, т.е. интервалом между выключением транзистора за счет токового компаратора и его включением при помощи генератора. При этом чем быстрее ток нарастет до установленного значения, тем дольше он потом сможет спадать, т.е. быстрый «заряд» обмотки повлечет увеличение токовых пульсаций, что, в свою очередь, приведет к дополнительному нагреву двигателя. Уменьшить размах пульсаций можно увеличивая тактовую частоту генератора, однако, следует помнить, что динамические потери на ключе и его нагрев при этом возрастут. На практике частота генератора берется равной не ниже 20кГц (верхний порог слышимости), в противном случае дополнительный шум, создаваемый двигателем в процессе импульсной стабилизации тока, может быть слышен.
Второй вариант снижения динамических потерь на ключе предполагает выключение токового компаратора на строго определенный промежуток времени tOFF (данный подход реализован в микросхемах A3977 и A3979). При этом для управления транзистором VT1 вновь используется RS-триггер, сбрасываемый компаратором, только устанавливается он не генератором, а схемой задержки, которая как раз формирует интервал времени tOFF:
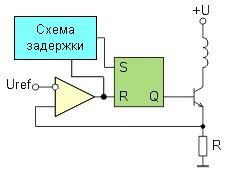
По умолчанию триггер установлен, ключевой транзистор открывается, и ток в обмотке начинает расти, увеличивая падение напряжения на датчике тока. Когда это напряжение достигает опорного значения Uref, компаратор переключается, сбрасывая RS-триггер и запуская схему задержки. Ключевой транзистор при этом выключается, и ток фазы начинает спадать до тех пор, пока триггер вновь не будет установлен схемой задержки через интервал времени tOFF. Такая схема обеспечивает постоянный размах токовых пульсаций в обмотке, но частота этих пульсаций, как и в случае простейшей схемы (см. выше), будет зависеть от скорости нарастания тока фазы. Однако, в отличие от простейшего варианта, здесь частота включения/выключения транзистора будет ограничена временем tOFF – она не может быть больше fMAX=1/tOFF. Поэтому изменяя значение tOFF, мы можем добиться, с одной стороны, уменьшения динамических потерь на ключе, а с другой – приемлемого уровня пульсаций тока в обмотке. Но в любом случае – как и ранее, частота переключения триггера должна быть выше 20кГц, чтобы шум, создаваемый ШД в процессе импульсной стабилизации тока, не был слышен.
▪ Типы спада тока в обмотках
Как неоднократно говорилось выше, обмотки шагового двигателя представляют собой индуктивности, которые в процессе вращения ротора попеременно то включаются, то выключаются. В то же время известно, что после отключения индуктивности от источника питания ток, протекающий через нее, не может мгновенно прекратиться. Для поддержания этого тока в обмотке возникает ЭДС самоиндукции, имеющая направление, противоположное источнику питания.
Скорость изменения тока в индуктивности прямо пропорциональна приложенному к ней напряжению. Это справедливо как для нарастания тока, так и для его спада. Только в первом случае поставщиком энергии является источник питания, а во втором сама индуктивность отдает запасенную энергию. Данный процесс может происходить при разных условиях, и скорость спада тока в обмотке будет определяться именно этими условиями.
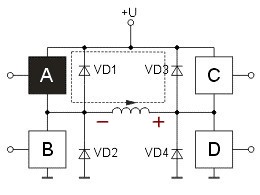
В современных универсальных драйверах шаговых двигателей обмотки обычно коммутируются при помощи полных мостов (т.н. «Н-мост»). На рисунке ниже показано состояние ключей выходного моста, при котором обмотка ШД включена (ток течет через ключи A и D, его направление показано стрелкой):
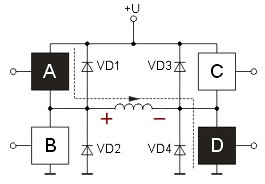
Очевидно, что для выключения тока можно отключить все ключи H-моста или же оставить один ключ включенным, причем, скорость спада тока обмотки в этих случаях будет разной. Сначала рассмотрим вариант, когда один транзистор выходного моста остается включенным:
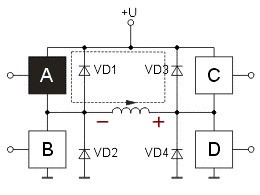
В этом случае ЭДС самоиндукции закорачивается через включенный ключ и диод VD3, поэтому на выводах обмотки будет небольшое напряжение, которое сложится из прямого падения напряжения на диоде и падения напряжения на ключе (в случае биполярного транзистора это будет напряжение его насыщения, а в случае полевого – падение на сопротивлении открытого канала). Поскольку напряжение на выводах обмотки сравнительно мало́, малой будет и скорость изменения (спада) тока в ней, поэтому скорость спадания магнитного поля тоже будет небольшой. А это значит, что еще некоторое время статор двигателя будет создавать магнитное поле, которого в данный момент быть уже́ не должно. На вращающийся ротор это поле окажет тормозящее воздействие, поэтому на высоких скоростях работы двигателя данный эффект может серьезно помешать его нормальной работе.
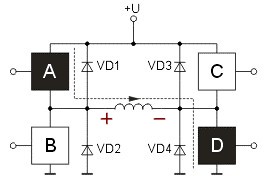
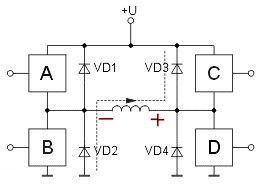
Возможен и другой способ отключения тока обмотки, когда размыкаются все ключи H-моста:

При этом ЭДС самоиндукции закорачивается через диоды VD2 и VD3 на источник питания. Это значит, что во время спада тока на обмотке будет присутствовать напряжение, равное сумме напряжения источника +U и прямого падения на двух диодах. По сравнению с первым случаем, это значительно бо́льшая величина, поэтому спад тока и магнитного поля будет более быстрым. Платить за ускоренный «разряд» обмотки приходится тем, что в ряде случаев из-за него на источнике могут появиться выбросы напряжения, для подавления которых понадобятся специальные демпферные цепочки. Кроме того, очень важно, что при быстром спаде наблюдаются повышенные пульсации тока в обмотке, а это, помимо всего прочего, вызывает дополнительный нагрев двигателя. Отметим, что медленному спаду будут сопутствовать малые пульсации тока в обмотке, поэтому в данном случае дополнительный нагрев ШД будет незначителен. В связи с этим на низких скоростях работы, когда тормозящее воздействие спадающего магнитного поля успеет пропа́сть до нового включения обмотки, рекомендуется использовать именно медленный спад тока фазы.
Детальное описание микросхем
▪ Принцип работы
Микросхемы A3977 и A3979 являются завершенными драйверами для биполярных («двухфазных») шаговых двигателей, поддерживающими режим микрошага, т.е. позволяющими делить один полный «паспортный» шаг ШД на несколько частей. Микросхема A3977 реализует деление шага на 2, 4 и 8, микросхема A3979 – на 2, 4 и 16. Возможно также вращение двигателя в полношаговом режиме с перекрытием фаз («Two-Phase-On» Full-step, см. выше). Встроенный транслятор1 позволяет упростить управление микросхемами и свести количество управляющих сигналов к минимуму. Выходная (силовая) часть микросхем представляет собой два полных Н-моста (по одному на каждую обмотку двигателя), в верхнем и нижнем плече которых установлены N-канальные полевые транзисторы. Данные ключи управляются схемой импульсной стабилизации тока обмотки с фиксированным временем отключения транзисторов tOFF (см. пункты «Стабилизация тока в обмотках» и «Схема стабилизации тока в обмотках ШД»). Выходной ток Н-моста на каждом шаге двигателя определяется номиналом соответствующего токового датчика (RS1 или RS2), значением опорного напряжения микросхемы (VREF), а также выходным напряжением ЦАПа, относящегося к данному мосту (это напряжение устанавливается транслятором при помощи 4-х разрядного цифрового кода).
После подачи питания или после сброса транслятор устанавливает оба ЦАПа и полярность тока в обмотках (фазах) двигателя в т.н. исходное состояние, называемое также «HOME» (см. пункты «Графики работы в разных режимах микрошага» и «Выход контроля исходного состояния»). Схема токовой стабилизации для обеих обмоток автоматически переключается в режим смешанного спада тока (см. пункт «Режимы спада тока в обмотках»). По пришествии на вход «STEP» переднего (положительного) фронта тактового импульса транслятор автоматически переключает ЦАПы в состояние, следующее сразу за исходным (см. пункт «Таблица значений тока в обмотках»), при этом учитывается состояние входа «DIR», задающего направление вращения, и входов «MS1-MS2», задающих режим микрошага (см. пункт «Таблица установки режима микрошага»). Если модуль (именно модуль!) нового уровня напряжения на выходе ЦАПа ниже предыдущего, режим спада тока для соответствующего выходного моста будет установлен в соответствии с состоянием входа «PFD» (быстрый, медленный или смешанный режим, см. пункт «Режимы спада тока в обмотках»). Если же модуль нового уровеня больше или равен предыдущему, для моста будет установлен режим медленного спада тока, независимо от состояния входа «PFD». Данный автоматический выбор режима спада тока позволяет увеличить эффективность работы микросхемы и точность позиционирования ротора в режиме микрошага, что достигается за счет уменьшения искажений формы тока в обмотках, обусловленных наличием обратной ЭДС.
1 - под транслятором понимается схема преобразования «простейших» сигналов управления типа STEP, DIR и т.д. в сигналы управления ЦАП'ами драйвера.
▪ Вход тактовых импульсов («STEP»)
Наличие на входе «STEP» переднего (положительного) фронта тактового импульса переключает транслятор микросхемы в следующее состояние и, соответственно, заставляет вал двигателя повернуться на один шаг. Угол поворота вала определяется состоянием входов «MS1:MS2», задающих режим микрошага (см. ниже). Направление поворота вала определяется состоянием входа «DIR» (см. ниже).
▪ Вход выбора направления вращения («DIR»)
Состояние данного входа задает направление поворота вала шагового двигателя (по часовой стрелке, либо против часовой стрелки). Обратите внимание на то, что любые изменения на этом выводе вступят в силу только после прихода на вход «STEP» переднего фронта следующего импульса.
▪ Входы выбора режима микрошага («MS1» и «MS2»)
Состояние входов «MS1» и «MS2» задает текущий режим микрошага (см. пункт «Таблица установки режима микрошага»). Обратите внимание на то, что любые изменения на данных входах войдут в силу только после прихода на вход «STEP» переднего фронта следующего импульса.
▪ Выход контроля исходного состояния («HOME»)
Выход «HOME» предназначен для индикации того, что транслятор микросхемы находится в исходном состоянии, называемом также «HOME». Данное состояние соответствует повороту ротора двигателя ровно на 45° и току в обеих обмотках двигателя, равному 70.71% от максимального (см. пункт «Графики работы в разных режимах микрошага»). Выход «HOME» сбрасывается в исходном состоянии транслятора, всё остальное время он установлен. Обратите внимание на то, что при подаче напряжения питания на «логическую» часть чипа (VDD) транслятор устанавливается именно в исходное состояние.
Отметим, что для предотвращения переходных процессов и потери шагов, переключение режимов работы двигателя (из микрошагового режима в полношаговый и т.п.) рекомендуется производить в те моменты, когда ротор находится в положении, соответствующем только одной включенной фазе, т.е. в состоянии своего «естественного» равновесия. Из таблицы токов в обмотках (см. выше) видно, что при работе двигателя с делением шага на 2, 4, 8 и 16 данное положение может быть легко «вычислено» при помощи сигнала «HOME». Например, после 45° ближайшему из возможных положений «естественного» равновесия соответстует угол поворота ротора 90°, и чтобы в него попасть, нужно сделать 1, 2, 4 и 8 шагов при делении шага на 2, 4, 8 и 16 соответственно.
▪ Вход сброса («nRESET»)
При наличии на входе сброса логического нуля транслятор микросхемы автоматически переводится в исходное состояние «HOME» (см. пункт «Графики работы в разных режимах микрошага»). При этом выходные мосты отключаются, выход «HOME» сбрасывается, а все тактовые импульсы на входе «STEP» игнорируются. Данная ситуация будет наблюдаться до тех пор, пока на вход сброса не будет подана логическая единица.
▪ Вход активизации режима сна («nSLEEP»)
При наличии логического нуля на входе «nSLEEP» микросхемы A3977 и A3979 входят в режим сна. Данный режим характеризуется минимальным потреблением энергии (за счет отключения большинства внутренних узлов чипа) и обычно активизируется в те промежутки времени, когда двигатель не используется. Появление логической единицы на входе «nSLEEP» переводит микросхему в нормальный режим работы, при этом транслятор будет сброшен в исходное состояние. Обратите внимание на то, что переход из режима сна в нормальный режим требует определенного времени (около 1мс) для стабилизации работы повышающего преобразователя с накачкой заряда (Charge Pump, см. пункт «Функциональная схема »). В течение этого времени подавать тактовые импульсы на вход «STEP» не следует, поскольку нет гарантии нормальной работы ключей в верхних плечах выходных мостов.
Отмечу, что в процессе работы с микросхемами A3977 и A3979 было выявленно следующее - после вывода драйвера из режима сна (т.е. после подачи на вход «nSLEEP» единицы) двигатель, подключенный к чипу, начнет издавать лютый свист, причем, свистеть он будет даже в том случае, когда ток удержания (см. выше) установлен на минимум. При этом свист исчезает сразу же, как только движок сделает хотя бы шаг (т.е. транслятор переключится в следующее положение). Такое поведение чипа в даташыте нигде не описано, поэтому пришлось изучать вопрос самостоятельно. Судя по всему, свист обусловлен тем, что на выводах RC1 и RC2 (см. далее) после подачи питания и после выхода из спячки формируется какой-то кривой сигнал. По идее, там должно быть быстрое нарастание напряжения, а потом экспоненциальный спад (т.е. типовое поведение входа, к которому подключена RC-цепь). Однако, если nSLEEP переведен из нуля в единицу, но транслятор не переключился ни на один шаг, перед экспоненциальным спадом напряжение довольно долго удерживается в максимуме, поэтому время tOFF при стабилизации тока серьезно увеличивается, частота токостабилизирующего ШИМа падает и становится слышна. Как только на транслятор приходит первый импульс STEP, всё сразу становится нормально и свист пропадает.
Поскольку проблема нигде не описана, для ее решения я не нашел ничего лучше, чем просто тупо сначала сделать один шаг по часовой стрелке (это изменит состояние транслятора и, как следствие, уберет свист), а затем – один шаг против часовой стрелки (это вернет транслятор в исходное состояние). Понятно, что подобный способ довольно коряв, но, повторюсь, это единственный путь устранения свиста, до которого я дошел (а разных вариантов я перепробовал немало). Поэтому буду крайне благодарен, если кто-либо поделится более изящным решением (или, возможно, подскажет какой-то рекомендованный самим производителем путь).
▪ Вход разрешения работы («nENABLE»)
При наличии логического нуля на входе разрешения работы («nENABLE») силовые выходы микросхемы включены (активны). В противном случае (на входе «nENABLE» присутствует логическая единица) силовые выходы отключены. Обратите внимание на то, что входы транслятора «STEP», «DIR», «MS1» и «MS2» будут оставаться активными (т.е. транслятор будет на них реагировать в обычном режиме) независимо от состояния входа «nENABLE». Это отличает вход разрешения работы «nENABLE» от входа сброса чипа «nRESET» (см. выше), наличие нуля на котором полностью отключает чип.
▪ Схема стабилизации тока в обмотках ШД
Каждый из двух выходных мостов микросхем A3977, A3979 управляется импульсной схемой, которая позволяет ограничивать ток в обмотках на заданном уровне (ITRIP). В начале каждого шага одна из диагоналей каждого моста включена, поэтому через соответствующую обмотку двигателя и токовый датчик (RSX) течет ток. В тот момент, когда напряжение на датчике тока станет равно напряжению на выходе ЦАПа, устанавливающему требуемое значение ITRIP, схема стабилизации выключит активную диагональ. В режиме медленного спада тока (см. ниже) отключается только верхний транзистор диагонали, в режимах быстрого и смешанного спада – оба транзистора (и верхний, и нижний). Отметим, что мост всегда отключается на фиксированное время tOFF, после чего транзисторы снова открываются, и ток в обмотке начинает возрастать. Более подробно процесс стабилизации тока фазы рассмотрен в пункте «Стабилизация тока в обмотках».
Максимально возможное значение тока в обмотке (ITRIP_MAX) определяется номиналом соответствующего токового датчика (RSX) и опорным напряжением ЦАПов, подаваемым на вход «REF» (вывод №8 чипа в корпусе TSSOP-28). Данное значение может быть найдено как
ITRIP_MAX = VREF / (8RS)
(восьмерка в знаменателе возникает из-за того, что входной буфер по входу «REF» делит подаваемое на чип опорное напряжение на 8, см. пункт «Функциональная схема »).
Отметим, что ITRIP_MAX – это именно максимально возможное значение тока, т.е. бо́льший ток через обмотку не может потечь в принципе. При вращении же двигателя ЦАПы устанавливают в обмотках лишь определенную часть этого тока, соответствующую текущему шагу:
ITRIP = (%ITRIP_MAX / 100) × ITRIP_MAX
(значения %ITRIP_MAX в процентах от максимально возможного значения тока ITRIP_MAX указаны в пункте «Таблица значений тока в обмотках»)
Обратите внимание на то, что при помощи напряжения на входе «REF» можно изменять максимально возможное значение тока в обмотке при неизменном номинале токового датчика. Данная возможность широко применяется на практике. Например, она позволяет управляющему микроконтроллеру устанавливать разный ток обмотки при вращении вала двигателя и при «простое» ШД (т.н. ток удержания, который может быть существенно меньше тока при вращении, см. пункт «Ток удержания ротора»).
Крайне важно не допускать превышения предельных значений уровня сигнала на входах «SENSE1», «SENSE2» и «REF». Для входов «SENSE1» и «SENSE2» это значение равно +0,5В (см. пункт «Максимально допустимые значения параметров»). На входе «REF» при работе в полношаговом режиме уровень сигнала не должен превышать значение VDD. Во всех остальных режимах опорное напряжение VREF должно быть не выше +4,0В.
По достижении током в обмотке заданного значения ITRIP схема стабилизации выключает драйвер соответствующего моста на фиксированное время tOFF. Длительность выключенного состояния определяется номиналами резистора RTX и конденсатора CTX, подключаемых к соответствующему входу «RCx» микросхемы, и может быть задана отдельно для каждого моста. При значениях RT=12кОм…100кОм и CT=470пФ…1500пФ время выключенного состояния моста может быть приближенно вычислено как
tOFF = RT × CT.
Выбор конкретного значения времени tOFF является нетривиальной задачей. Напомню (см. пункт «Стабилизация тока в обмотках»), что данное время вводится для ограничения частоты переключения токовых компараторов, увеличение которой ведет к возрастанию динамических потерь на ключах. При этом очевидно, что чем больше выбрано значение tOFF, тем ниже будет частота переключения компараторов, поэтому динамические потери в мостах снизятся. Однако, при этом возрастут пульсации тока через обмотку, что приведет к дополнительному нагреву мотора. Поэтому при выборе времени tOFF приходится искать некий компромисс между двумя вышеприведенными факторами, и при этом в расчетах вдобавок нужно учитывать следующее. Во-первых, как бы ни была хороша современная элементная база, всё-таки частоту управления ключами, встроенными в микросхемы, лучше не делать выше 100…150кГц. А во-вторых, частота переключения транзисторов должна быть выше 20кГц (верхний порог слышимости), чтобы шум, создаваемый двигателем в процессе импульсной стабилизации тока, не был заметен на слух. Исходя из этих условий, можно сказать, что фиксированное время выключенного состояния ключей лучше выбирать из диапазона
tOFF = 10мкс…50мкс,
что, кстати, отлично ложится в рамки, в которых работает формула для вычисления tOFF (tOFF_MIN=12кОм×470пФ=5,64мкс, tOFF_MAX=100кОм×1500пФ=150мкс).
▪ Игнорирование сигнала от токовых компараторов
В моменты переключения состояния выходных мостов в обмотке двигателя будут наблюдаться броски тока, связанные с работой защитных диодов и/или переходными процессами, обусловленными емкостной составляющей нагрузки и емкостями самих ключей. Эти броски тока, естественно, передадутся на токовые датчики, что может привести к ложным срабатываниям токовых компараторов микросхемы. Для устранения данного эффекта в схему импульсной стабилизации тока обмоток введена функция игнорирования сигнала от токовых компараторов в моменты переключения состояния выходных мостов. Время игнорирования для каждой обмотки определяется номиналом соответствующего конденсатора CTX и приблизительно может быть вычислено как
tBLANK = 1400 × CT
(что для CT=470пФ…1500пФ даст tBLANK=0,67мкс…2,1мкс).
▪ Режимы спада тока в обмотках
Как было показано в пункте «Типы спада тока в обмотках», при выключении фазы двигателя ток в ней может спадать по двум «сценариям» – медленному и быстрому. При этом тип «сценария» мы можем задавать сами: для реализации быстрого спада необходимо выключить оба транзистора активной диагонали выходного моста, а для реализации медленного – только один (в микросхемах A3977 и A3979 отключается ключ в верхнем плече диагонали).
Преимущество медленного затухания состоит в том, что пульсации тока в обмотке при нем минимальны, а это значит, что двигатель будет меньше греться. Однако если мы работаем в режиме микрошага и находимся на спаде синусоиды (напомню, что в идеале ток через обмотку двигателя должен представлять собой синус), то при слишком медленном спаде и сравнительно высокой скорости вращения ротора ток в обмотке может просто не успеть уменьшиться до следующего требуемого значения. Например, если транслятор находится в исходном состоянии («HOME»), и на входе «DIR» присутствует единица, то ток через обмотку №1 составляет 70,71% (см. пункт «Таблица значений тока в обмотках»). По приходу следующего импульса на вход «STEP» транслятор должен установить значение тока 63,44%, но может возникнуть ситуация, при которой к следующему шагу ток успеет упасть всего до, скажем, 68 процентов. В таком случае драйвер в принципе не сможет установить требуемые 63,44%, и ему придется либо ждать, пока ток фазы не уменьшится сам по себе (но при этом придется уменьшать скорость вращения ротора), либо переходить к следующему шагу, а там разница требуемого и реального токов станет еще больше. Более того – при медленном затухании и работе на спадающем участке синуса ток через обмотку в определенный момент вообще начнет нарастать! Происходит это за счет того, что обратная ЭДС двигателя становится больше напряжения питания ШД, поэтому она начинает «подзаряжать» обмотку в моменты затухания.
Обращаю ваше внимание на то, что приведенные примеры – вовсе не фантастика, и в реальных системах описанные эффекты приводят к сильному искажению тока через обмотку:

Видно, что на спаде синуса присутствуют два характерных участка – сначала ток через обмотку спадает не так быстро, как надо (1), а затем и вовсе начинает расти (2). Отметим, что подобные искажения формы тока приводят к повышенному шуму, издаваемому двигателем.
От описанных недостатков свободен режим быстрого затухания. Здесь во время спада тока на обмотке будет присутствовать напряжение значительно большее, чем в медленном режиме, поэтому уменьшение тока фазы будет более быстрым. Однако у быстрого затухания есть и серьезный минус – это повышенные токовые пульсации, которые вызывают дополнительный нагрев двигателя:

Но, несмотря на это, форма синусоиды в быстром режиме остается неискаженной.
Существует еще и третий режим спада тока, ранее не упоминаемый. Это смешанный режим, при котором ток в обмотке сначала затухает по быстрому «сценарию», а затем – по медленному:
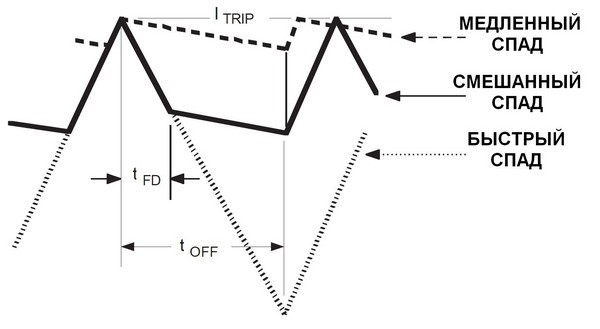
Отметим, что такой режим становится возможным лишь благодаря тому, что мы можем управлять каждым транзистором выходных мостов по отдельности. При смешанном спаде время выключенного состояния ключей tOFF (см. пункт «Схема стабилизации тока в обмотках ШД») разбивается на два интервала. После того, как ток достигает значения ITRIP, обмотка выключается, и ток в ней сначала начинает спадать быстро. Во время этого процесса напряжение на соответствующем выводе «RCx» тоже постепенно уменьшается, и быстрый «разряд» фазы длится до тех пор, пока данное напряжение не сравняется с напряжением VPFD на входе «PFD» (Percent Fast Decay). Приближенно интервал времени tFD можно рассчитать по формуле
tFD = RTCT × ln(0.6VDD / VPFD)
После этого устройство переключит обмотку в режим медленного спада тока на всю оставшуюся часть интервала tOFF. В результате данных манипуляций получаем форму тока фазы, которая, с одной стороны, не особо искажена, а с другой – имеет небольшие пульсации.
Для того, чтобы показать преимущества смешанного режима спада тока, отобразим на одном рисунке все три типа спада:

Отчетливо видно, что смешанный режим реально убирает искажения синусоиды, присущие медленному спаду, а также снижает пульсации тока, вызываемые быстрым затуханием тока. Однако размах этих пульсаций все равно будет больше, чем для медленного «сценария». Очевидно, что наилучшим решением в данном случае является использование медленного режима на нарастающем участке синуса и смешанного режима на спадающем участке. Ключевой особенностью микросхем A3977 и A3979 является то, что они осуществляют переключение между данными режимами спада тока автоматически. Когда на вход «STEP» поступает очередной импульс, транслятор сначала выставляет на ЦАПах уровни тока, соответствующие следующему шагу. Если новый уровень напряжения на выходе ЦАПа ниже, чем предыдущий, то режим спада тока для этого H-моста будет установлен в соответствии с уровнем сигнала на входе «PFD»:
| VPFD > 0,60 × VDD | режим медленного спада тока; |
| VPFD < 0,21 × VDD | режим быстрого спада тока; |
| 0,21 × VDD ≤ VPFD ≤ 0,60 × VDD | режим смешанного спада тока. |
Если новый уровень напряжения на выходе ЦАПа равен или больше предыдущего, то для этого H-моста будет установлен медленный режим спада, независимо от уровня сигнала на входе «PFD».
Отметим, что вышеприведенные значения напряжения VPFD взяты не с потолка, а напрямую следуют из последней формулы с логарифмом. В самом деле, если уровень сигнала на входе «PFD» выше, чем 0,6VDD, то временно́й интервал tFD, в течение которого длится быстрый спад тока в обмотке, будет аж отрицательным, поскольку дробь под логарифмом станет меньше единицы:
tFD = RTCT × ln(0.6VDD / VPFD) < 0 при VPFD > 0,60 × VDD, т.к. 0.6VDD / VPFD < 1
Физически это означает, что интервал времени с быстрым спадом у нас тупо пропадет, поэтому останется только медленное затухание. Если же сигнал на входе «PFD» меньше 0,21VDD, то дробь под логарифмом станет больше 2.85, поэтому значение самого́ логарифма будет больше единицы. Таким образом, мы получим, что время tFD станет больше произведения RTCT, то есть длительность быстрого разряда обмотки превысит время выключенного состояния ключей tOFF (поскольку RTCT=tOFF):
tFD = RTCT × ln(0.6VDD / VPFD) > tOFF при VPFD < 0,21 × VDD, т.к. 0.6VDD / VPFD > 2.85
Физически это означает, что момент начала медленного спада у нас никогда не настанет, поэтому всё время выключенного состояния ключей будет длиться только быстрое затухание. Отмечу, что «математически» отсутствие медленного спада должно начаться при
VPFD < 0,6VDD / e = 0,22VDD,
поскольку логарифм в формуле будет больше единицы уже́ при этом значении, а не при 0,21VDD. Но здесь, видимо, сказывается то, что формула для tFD является не точной, а приблизительной.
Ну и самое интересное будет наблюдаться при значениях сигнала на входе «PDF», находящихся в диапазоне 0,21VDD…0,6VDD. Как видно из формулы с логарифмом, регулируя напряжение в этих пределах, мы можем менять момент начала медленного спада тока в режиме смешанного затухания. Чем меньше будет уровень сигнала на входе «PFD», тем дольше будет длиться быстрый спад тока, что увеличит токовые пульсации на синусоиде, но зато меньше исказит ее форму. По мере увеличения напряжения VPFD будет расти доля медленного спада тока, поэтому пульсации начнут уменьшатся, но при этом увеличатся искажения синуса. Зависимость длительности интервала tFD (в процентах от времени выключенного состояния ключей tOFF) от напряжения VPFD показана на рисунке ниже (график с точками):
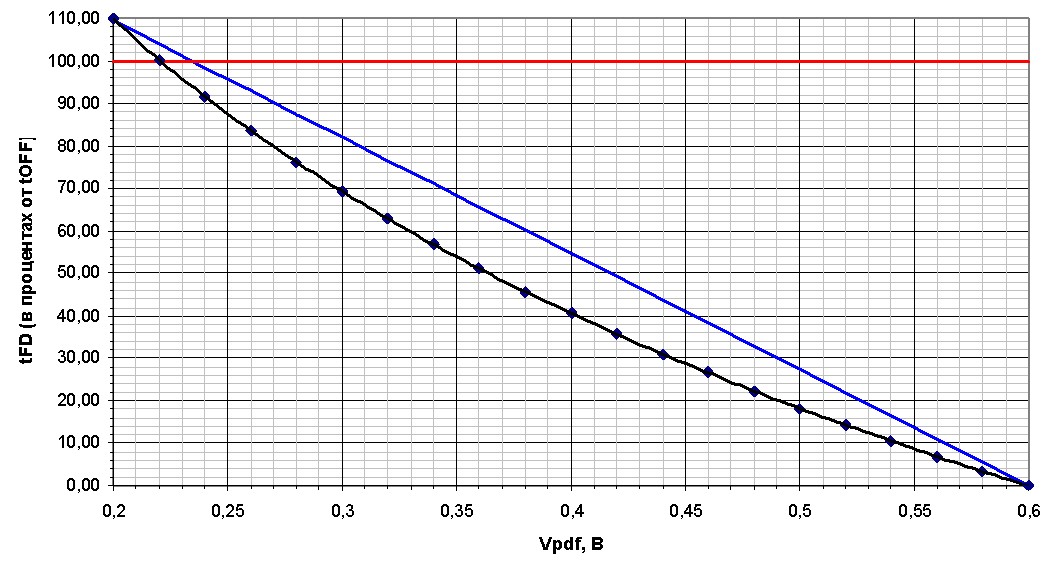
Еще раз отметим, что зависимость времени быстрого спада тока от напряжения VPFD не является линейной (для сравнения на картинке синим цветом нарисован также график соответствующей линейной функции).
▪ Принцип синхронного выпрямления (вход «nSR»)
Пусть через диагональ «A-D» Н-моста, в которую включена обмотка двигателя, течет ток:
Как неоднократно говорилось выше, после выключения обмотки ток в ней будет постепенно спадать. При этом в зависимости от созданных условий этот спад может быть либо медленным, либо быстрым (более подробно об этом рассказано в пункте «Типы спада тока в обмотках»). Если используется медленный спад и оставлен открытым ключ «А», то «разряд» обмотки пойдет через него и диод VD3:
Если же используется быстрый спад, то путь тока будет лежать через диоды VD2 и VD3:
Преимущество использования диодов в данном случае заключается в том, что ими не нужно дополнительно управлять – они сами «знают», когда нужно открываться (собственно говоря, на этом их свойстве и основана схема). Однако на открытых диодах падает сравнительно большое напряжение, поэтому если через обмотку протекает немалый ток (что характерно для мощных двигателей), это приводит к существенному увеличению потерь в моменты спада тока фазы, что выльется в дополнительный нагрев корпуса микросхемы. В связи с этим весьма желательно от диодов в схеме избавиться, и это вполне выполнимо.
Из последнего рисунка видно, что параллельно каждому из четырех диодов включен свой транзистор Н-моста. И если замкнуть один из ключей, то соответствующий диод будет зашунтирован сопротивлением открытого канала транзистора (далее рассматривается мост, построенный исключительно на полевых транзисторах, поскольку на выходе микросхем A3977 и A3979 установлены именно полевики). А поскольку у современных полевых транзисторов сопротивление открытого канала довольно мало́, это поможет снизить падение напряжения на соответствующем участке схемы. Таким образом, получаем, что для уменьшения потерь нам необходимо на время тока спада тока фазы открывать ключ «C» (медленный режим) или ключи «B» и «C» (быстрый режим). В этом и состоит принцип синхронного выпрямления. Единственная проблема здесь – уметь включать и выключать нужные транзисторы именно в нужное время, и микросхемы A3977/A3979 это делать умеют. Если функция синхронного выпрямления включена, алгоритм работы чипа будет следующим.
После того, как ток в обмотке достиг заданного уровня, схема импульсной стабилизации отключает «основную» диагональ (на предпоследнем рисунке это диагональ «A-D»). При этом в зависимости от требуемого режима спада тока выключается либо один транзистор диагонали1, либо оба. А далее чип открывает либо ключ «В», тем самым шунтируя диод VD2, либо ключи «В» и «D», закорачивая диоды VD2 и VD3:

1 - в микросхемах A3977 и A3979 при медленном режиме спада тока обмотки остается включенным нижний транзистор диагонали, поэтому будет выключен транзистор «А».
Таким образом, путь по которому спадает ток в обмотке, останется прежним, но диоды в этом процессе участия принимать уже не будут.
Обратите внимание на то, что в быстром режиме ток фазы при ее «разряде» постоянно контролируется при помощи соответствующего датчика RS. Непосредственно перед тем, как обмотка полностью «разрядится», все полевые транзисторы выключаются, и оставшийся небольшой ток проходит через диоды VD2 и VD3. Тем самым гарантированно исключается ситуация «обратной проводимости», при которой обмотка начинает снова «заряжаться» после того, как ток в ней спадет до нуля, только теперь «заряд» идет уже через диагональ «B-C». Для режима же медленного спада это неактуально, поскольку в нем фаза в принципе не может быть подключена к источнику питания, и после затухания тока она заведомо будет обесточена.
Несколько слов нужно сказать о диодах VD1…VD4. Дело в том, что, как неоднократно говорилось, выходные мосты микросхем A3977 и A3979 построены на основе полевых N-канальных транзисторов, а такие ключи уже «от рождения» имеют встроенные внутренние диоды (см. технологию изготовления MOSFET). И хотя эти диоды являются паразитными, никто не мешает использовать их для реализации медленного и быстрого спада тока обмотки двигателя. Таким образом, получаем неплохую экономию, поскольку элементы VD1…VD4 на схемах выше у нас будут образовываться сами собой, т.е. без дополнительных затрат. Однако паразитные внутренние диоды полевых транзисторов традиционно имеют большое значение прямого падения напряжения (для чипов A3977 и A3979 оно составляет VF = +1,4В). Поэтому в том случае, когда по каким-либо причинам принято решение выключить функцию синхронного выпрямления, для работы с мощными двигателями лучше использовать внешние диоды Шоттки, дополнительно устанавливаемые параллельно диодам VD1…VD4. Конечно, это увеличит общую стоимость драйвера, да и ме́ста на плате внешние диоды займут немало, но зато они существенно снизят потери в момент спада тока обмотки (типовое значение падения напряжения на 3А-ном Шоттки составляет VF=+0,50В…+0,55В).
Управление режимом синхронного выпрямления производится при помощи сигнала, подаваемого на вход «nSR» микросхемы. Если на данном выводе присутствует нуль, синхронное выпрямление включено, в противном случае оно выключено. Разницу в потерях при включенной и выключенной функции синхронного выпрямления можно грубо оценить при условии протекания постоянного тока через мост. Пусть этот ток будет равен I=1,25А (ровно половина от максимально допустимого для A397x), режим спада выберем медленный (для него выигрыш в эффективности будет наименьшим), а в качестве драйвера используем чип A3977 без внешних диодов. Отметим, что сопротивление открытого канала у нижних транзисторов выбранной микросхемы не превышает RDS(ON)_MAX=0,43Ом, а падение напряжения на внутреннем диоде составляет VF=+1,4В (см. пункт «Электрические характеристики»). Из последнего рисунка видно, что при выключенном режиме синхронного выпрямления ток обмотки после выключения будет спадать через ключ «D» и диод VD2. При этом потери на ключе составят PVT = I2×RDS(ON) = 1,25А2×0,43Ом = 0,67Вт, а на диоде PVD = I×VF = 1,25А×1,4В = 1,75Вт, поэтому суммарно мы потеряем
PD = PVT + PVD = 0,67Вт + 1,75Вт = 2,45Вт
Если же режим синхронного выпрямления включен, то ток обмотки будет спадать через два нижних ключа «В» и «D» (см. последний рисунок), и суммарные потери сложатся из потерь на каждом из этих ключей. С учетом того, что и транзистор «B», и транзистор «D» расположены в нижних плечах моста, суммарные потери при включенном синхронном выпрямлении составят
PD SR = 2 × PVT = 2 × 0,67Вт = 1,34Вт
то есть будут в 1,8 раза меньше. Если же использовать чип A3979 с RDS(ON)_MAX=0,265Ом, то потери можно снизить еще в 1,5 раза. Поэтому в тех случаях, когда эффективность работы драйвера должна быть максимально возможной, лучше собирать его на базе A3979 (правда, эта микросхема и сто́ит дороже).
Отметим, что в случае использования внешних диодов Шоттки ситуация существенно улучшится. Например, если в качестве VD1…VD4 использовать 3А-ные диоды SK36 с падением напряжения, не превышающем значения VF=+0,55В (при токе I=1,25А), то суммарные потери для медленного режима спада составят
PD = PVT + PVD = I2×RDS(ON) + I×VF = 1,25А2×0,43Ом + 1,25А×0,55В = 0,67Вт + 0,69Вт = 1,36Вт,
т. е. в случае чипа A3977 они практически сравняются с потерями при синхронном выпрямлении. Другое дело, что диодов понадобится аж 8 штук (по 4 на каждый мост), и они далеко не бесплатны, да и место на плате занимают, а вот для работы в синхронном режиме никаких дополнительных затрат не требуется. Но при этом дальнейшее увеличение тока будет квадратично увеличивать потери для синхронного выпрямления, в то время как у диодов падение напряжения (а значит, и потери на них) вырастет несильно. Например, если провести расчет потерь для A3977 при максимально допустимом токе I=2,5А, где падение на диоде SK36 увеличится всего на 100мВ и составит VF=+0,65В, получим следующее. Потери с выключенным синхронным выпрямлением и внешними диодами составят:
PD = PVT + PVD = I2×RDS(ON) + I×VF = 2,5А2×0,43Ом + 2,5А×0,65В = 2,69Вт + 1,63Вт = 4,32Вт,
а со включенным синхронным выпрямлением –
PD SR = 2 × PVT = 2 × I2RDS(ON) = 2 × 2,5А2×0,43Ом = 2 × 2,69Вт = 5,38Вт
то есть с диодами потери получаются меньше. Так что совсем отказываться от работы с внешними выпрямителями не следует. Конечно, при малых мощностях используемых двигателей можно полностью положиться на функцию синхронного выпрямления – токи здесь потекут небольшие, поэтому нагрев корпуса микросхемы будет вполне приемлемым. А вот при управлении мощными ШД вполне может оказаться, что гораздо выгоднее использовать внешние диоды, хоть это и повлечет дополнительные затраты. При этом не следует забывать, что выпрямители, расположенные вне чипа, отведут на себя определенную часть тепла, поэтому корпус микросхемы будет греться меньше. Ну и к тому же мы всегда можем взять, например, 5А-е диоды, у которых падение напряжения обычно еще ниже, чем у 3А-ных, или поставить по два диода в параллель. Так что в случае управления мощной нагрузкой для оптимизации параметра «цена/эффективность» нужно тщательно взвешивать все «за» и «против» для каждого варианта схемы драйвера.
В завершении данного пункта отметим, что в реальной жизни мощность, выделяемая на микросхеме в процессе вращения двигателя, будет, конечно, ниже тех значений, которые были рассчитаны выше. Причин здесь множество – ток через обмотку будет течь не постоянный, а пилообразный, к тому же бо́льшую часть времени он будет ниже максимального, реальное падение напряжения на ключе/диоде тоже будет меньше максимально возможного и т.д. К тому же драйвер двигателя с импульсной стабилизацией тока находится в режиме затухания не всё время – есть еще и интервалы включенного состояния. Однако, соотношение потерь с включенной и с выключенной функцией синхронного выпрямления будет именно таким, как показано выше.
▪ Понижающий стабилизатор напряжения
В состав микросхем A3977 и A3979 входит встроенный понижающий стабилизатор напряжения (Regulator, см. пункт «Функциональная схема драйвера»), служащий для питания драйверов нижних ключей мостовых схем. Вход этого стабилизатора подключен к выводу VBB1, выход (это вывод VREG) должен быть заземлен через конденсатор номиналом 0,22мкФ. В чипы A3977 и A3979 также встроена схема контроля напряжения VREG, и в случае возникновения какой-либо ошибки в работе стабилизатора данная схема отключает силовые выходы микросхем.
▪ Повышающий преобразователь
В микросхемах A3977 и A3979 в выходных мостах в качестве верхних и нижних ключей обеих диагоналей применены полевые транзисторы одинакового типа (N-канальные). Для нормальной работы такого моста на затворы верхних транзисторов необходимо подавать напряжение, превышающее напряжение питания обмоток (VBB). Для формирования этого повышенного напряжения в чипах A3977 и A3979 используется схема с накачкой заряда (Charge Pump, см. пункт «Функциональная схема драйвера»). Обратите внимание – данная схема требует подключения керамического конденсатора номиналом 0,22мкФ между выводами «CP1» и «CP2». Такой же конденсатор необходимо подключить между выводами «VCP» и «VBB1» (этот конденсатор будет выступать в роли источника энергии, обеспечивающего броски тока во время заряда емкости затворов верхних ключей).
▪ Аварийное отключение силовой части (Shutdown)
В случае превышения температуры кристалла микросхемы или чрезмерно низкого напряжения на выходе схемы с накачкой заряда (т.е. на пине VCP) силовые выходы чипа отключаются до тех пор, пока температура и/или напряжение VCP не придет в норму. Также отключение силовых выходов происходит при низком уровне «цифрового» напряжения питания на выводе VDD (в том числе и в момент включения микросхемы), за что отвечает схема UVLO (UnderVoltage LockOut circuit). Обратите внимание на то, что в последнем случае кроме отключения выходов также произойдет сброс транслятора в исходное состояние (см. пункт «Графики работы в разных режимах микрошага»).
Информация по применению
▪ Разводка печатной платы
Печатная плата, на которую монтируется чип, должна иметь заземляющий полигон с большой площадью. Для достижения оптимальных характеристик тепловой вывод микросхем A3977 и A3979 следует припаивать напрямую к этому полигону (см. пункт «Тепловые характеристики»).
К выводам питания обмоток ШД («VBB1» и «VBB2») необходимо подключить блокировочный электролитический конденсатор емкостью не ниже 47мкФ, расположенный как можно ближе к корпусу микросхемы.
Вывод «PFD» должен быть заземлен через конденсатор номиналом 0,1мкФ.
Во избежание влияния электромагнитных помех силовые шины (толстые линии, см. пункт «Функциональная схема драйвера») должны быть разнесены с дорожками, по которым поступают логические сигналы, а также с цепями от датчиков тока до выводов «SENSE1» и «SENSE2».
Для улучшения помехоустойчивости сигналы управления микросхемой должны поступать от узлов с низким выходным сопротивлением.
▪ Заземление
Вывод «AGND» (заземление «логической» части) и вывод «PGND» (заземление силовой части) должны быть соединены друг с другом снаружи (т.е. через дорожку на печатной плате).
Все линии заземления должны быть соединены вместе и быть как можно короче. Оптимальной конфигурацией является «звезда» с центром, расположенным под микросхемой. В качестве точки соединения центра «звезды» и чипа обычно используется тепловой вывод, расположенный под корпусом драйвера.
▪ Измерение тока обмоток
Чтобы свести к минимуму неточности измерения тока, вызванные падением напряжения на дорожках печатной платы, токовые датчики RSX должны подключаться к центру «звезды» отдельными толстыми проводниками. Длина этих проводников должна быть максимально короткой.
В случае использования датчиков тока с низким сопротивлением должно также приниматься во внимание падения напряжения на дорожках, которыми эти датчики подключаются к силовой части.
Для подключения датчиков тока не рекомендуется использовать клеммы или разъемы, т.к. сопротивление их контактов может вносить ощутимую погрешность в сопротивление токового датчика.
Рекомендуемое сопротивление датчика тока рассчитывается по формуле:
RS = 0,5 / ITRIP_MAX.
▪ Тепловая защита
Внутренняя схема тепловой защиты отключает все транзисторы обоих выходных мостов, когда температура кристалла микросхемы достигает +165°C (типовое значение). Данная схема предназначена только для защиты драйвера от сбоев в работе из-за чрезмерной температуры чипа. Обратите внимание на то, что короткие замыкания на выходе мостов приведут к выгоранию соответствующих ключей даже в том случае, когда сработала тепловая защита. Гистерезис схемы тепловой защиты составляет около +15°С.
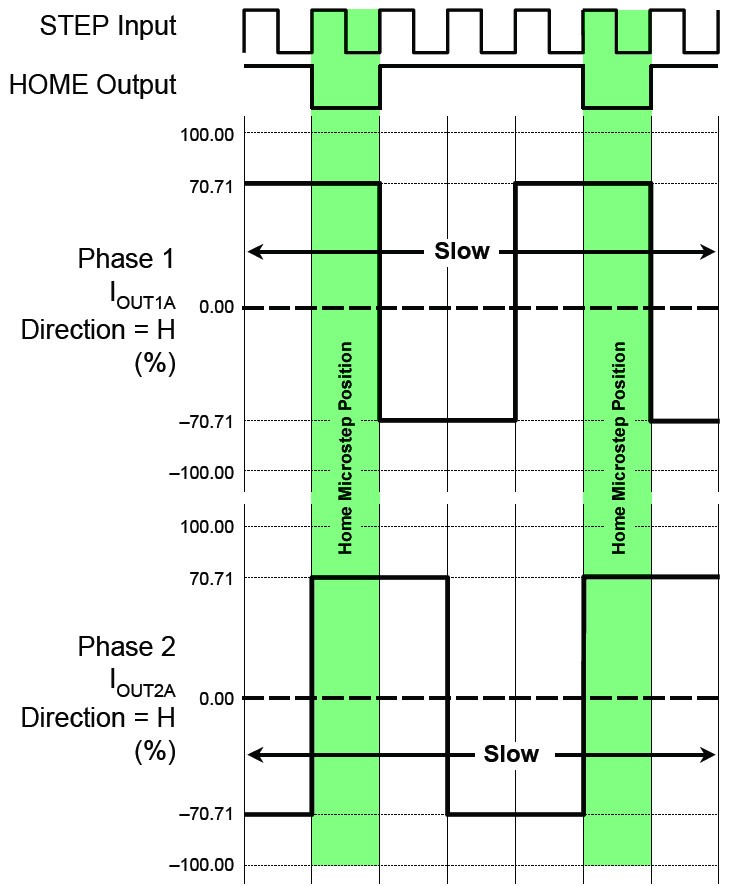
Графики работы в разных режимах микрошага
Полношаговый режим (MS1=MS2=0)
(при 0,21×VDD ≤ VPFD ≤ 0,60×VDD)
Деление шага на 2 (MS1=1, MS2=0)
(при 0,21×VDD ≤ VPFD ≤ 0,60×VDD)
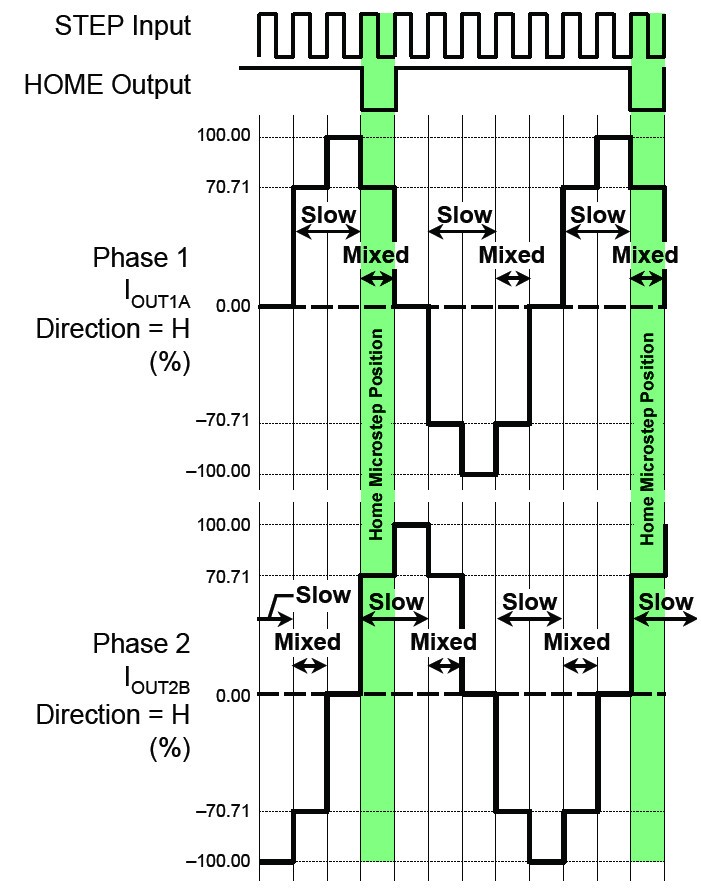
Деление шага на 4 (MS1=0, MS2=1)
(при 0,21×VDD ≤ VPFD ≤ 0,60×VDD)
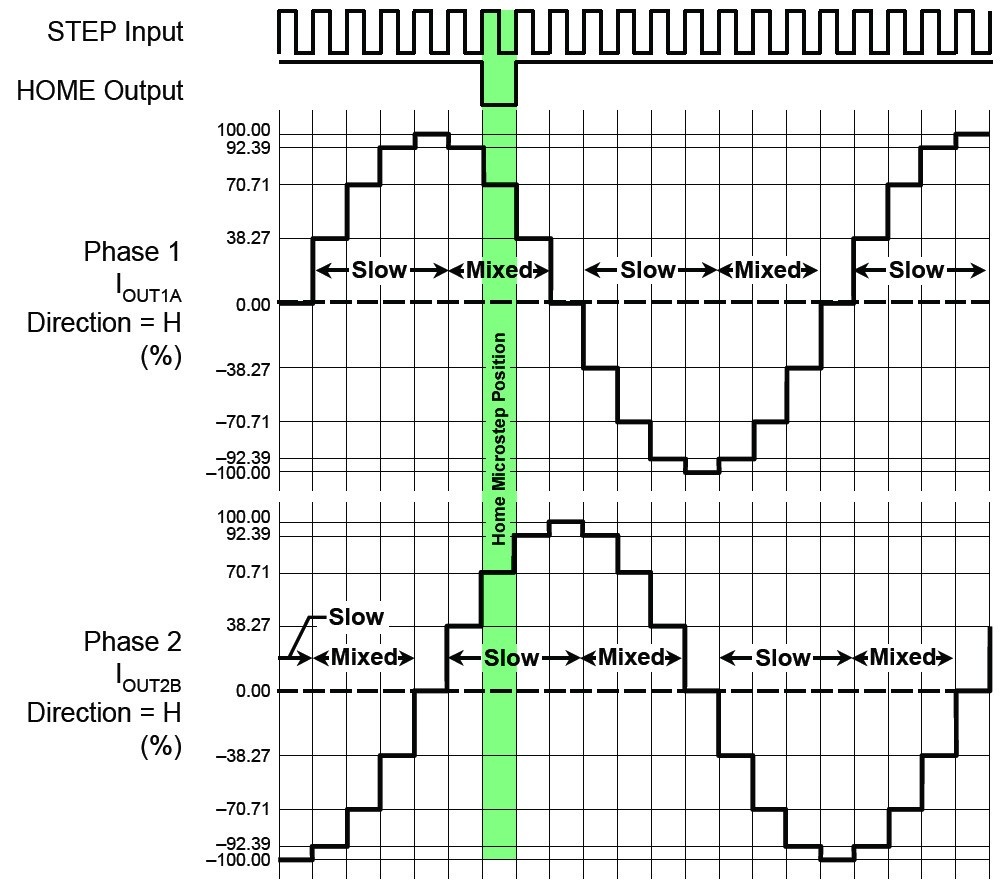
Деление шага на 8 (MS1=MS2=1; только для A3977)
(при 0,21×VDD ≤ VPFD ≤ 0,60×VDD)
Деление шага на 16 (MS1=MS2=1; только для A3979)
(при 0,21×VDD ≤ VPFD ≤ 0,60×VDD)

Обсудить эту заметку можно
здесь
Место для разного (сдается)